지능형 로봇을 위한 윔의 기술력을 살펴보세요
시뮬레이션부터 LLM 연동까지, WIM만의 핵심 기술이 로봇을 더 정밀하고 쉽게 제어할 수 있도록 만듭니다.
시뮬레이션 접목 기술
Simulation
3D 디지털 트윈 환경 구축과 다중 로봇 제어
산업용 로봇 도입 및 로봇 자동화 시스템 구축에 앞서 시뮬레이션을 통해 제조/생산 공정의 3D 디지털 트윈을 구축합니다. 3D 디지털 트윈 환경에서의 시뮬레이션 테스트를 통해 로봇의 실제 도입 모습을 미리 확인하거나, 로봇의 동작 범위를 점검하고, 다중 로봇의 충돌을 방지하는 등 로봇의 실적용 가능성을 평가하고 예측 데이터를 수집할 수 있습니다.


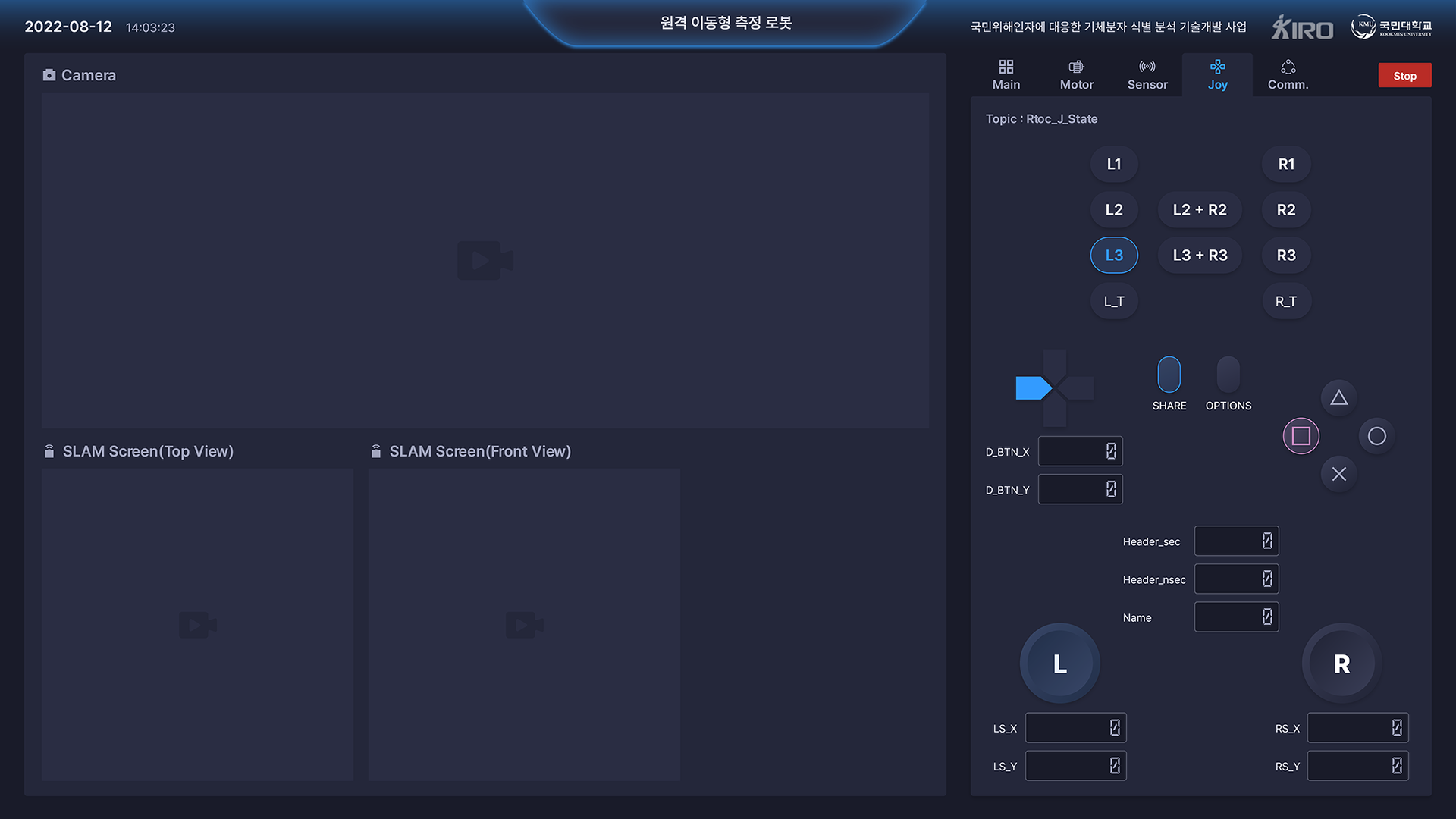
시뮬레이션 기반 로봇 제어
ROS2 기반의 시뮬레이션 환경에서 Trajectory 단계까지 정밀하게 로봇을 제어하며, 실제 환경에서도 동일한 제어를 구현합니다. 사무공간에서의 시뮬레이션 작업으로 엔지니어의 접근성을 크게 향상시킵니다.

아루코마커 로봇 제어 기술
AruCo Marker
ArUco Marker는 고유한 이진 패턴으로 구성된 2D 사각형 코드 기반의 시각적 마커로, 로봇이 스스로 위치와 자세를 정확하게 파악할 수 있도록 하여 외부 환경의 변화나 방해요소에도 기준점을 유지하며 안정적인 동작을 수행하도록 유도합니다.


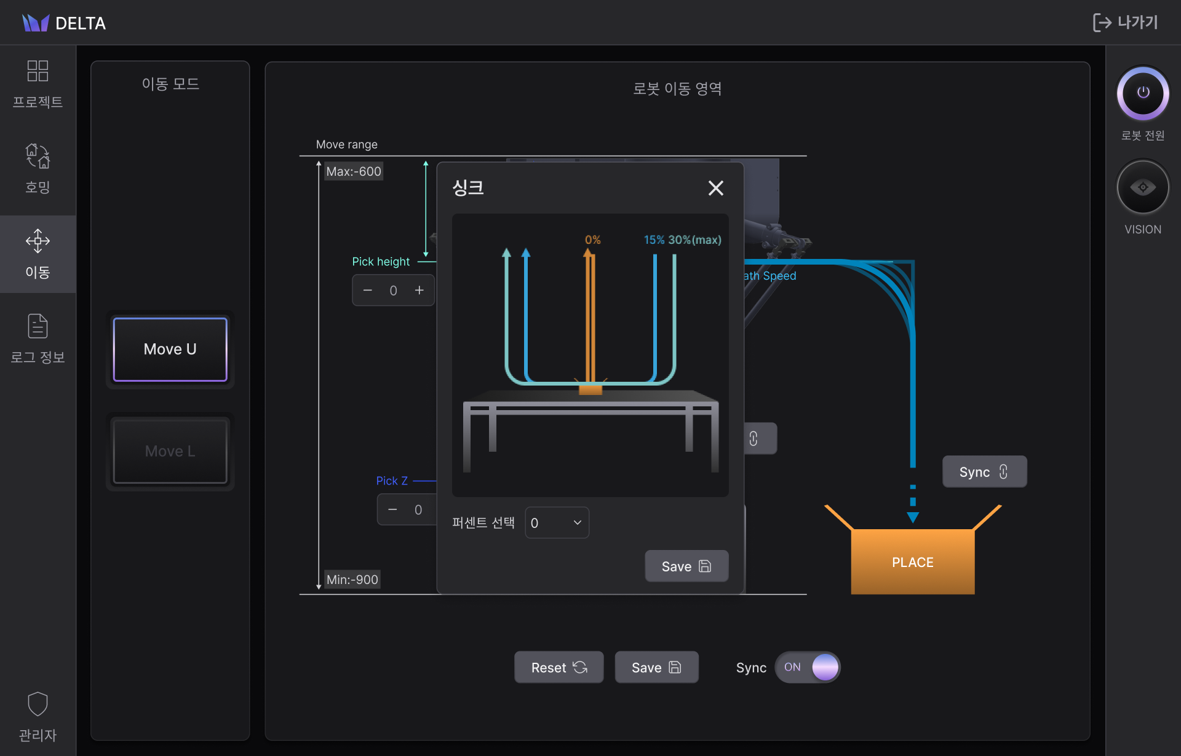
태블릿 기반 로봇 제어 기술
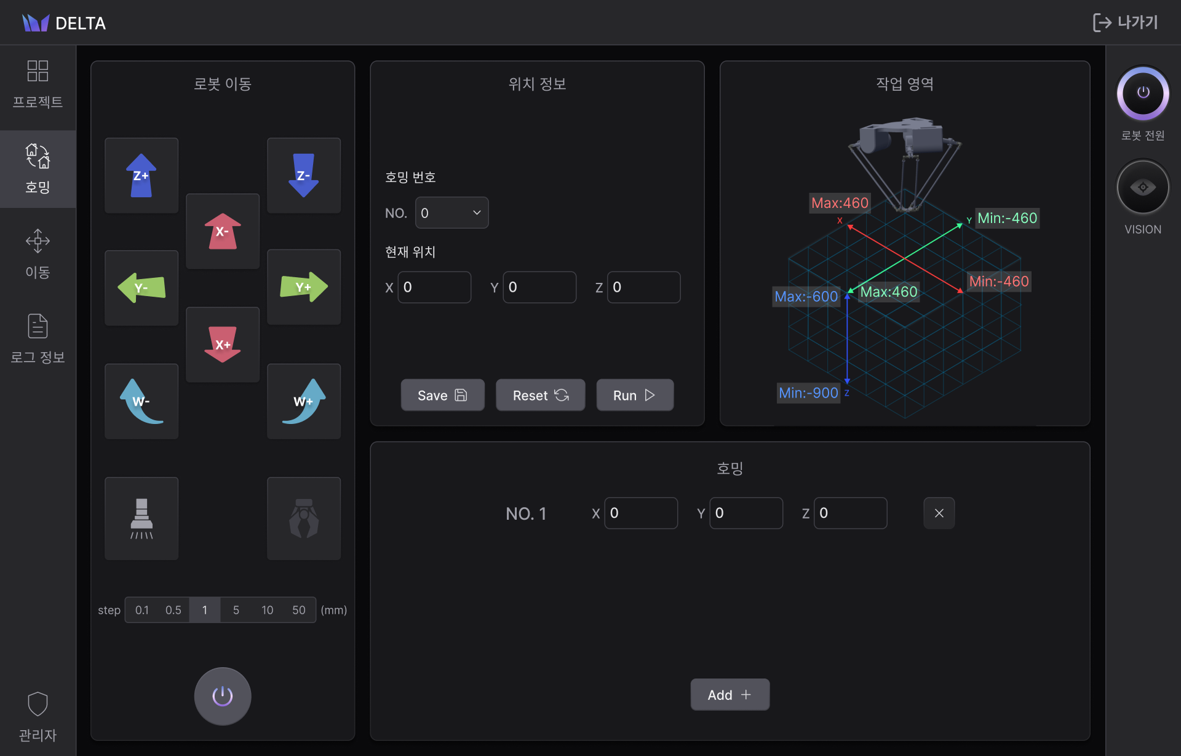
W-GUI (WIM Graphical User Interface)
W-GUI는 별도의 로봇 프로그래밍 없이 태블릿 화면에서 직관적으로 로봇팔을 제어할 수 있는 그래픽 사용자 인터페이스로, 로봇 개발 경험이 없는 현장 담당자도 쉽게 산업용 로봇을 운영할 수 있습니다. 터치가 가능한 모바일 태블릿에서도 사용이 가능하여 우수한 확장성을 가지며, 다양한 산업 현장에서 효율성과 유연성을 극대화합니다.
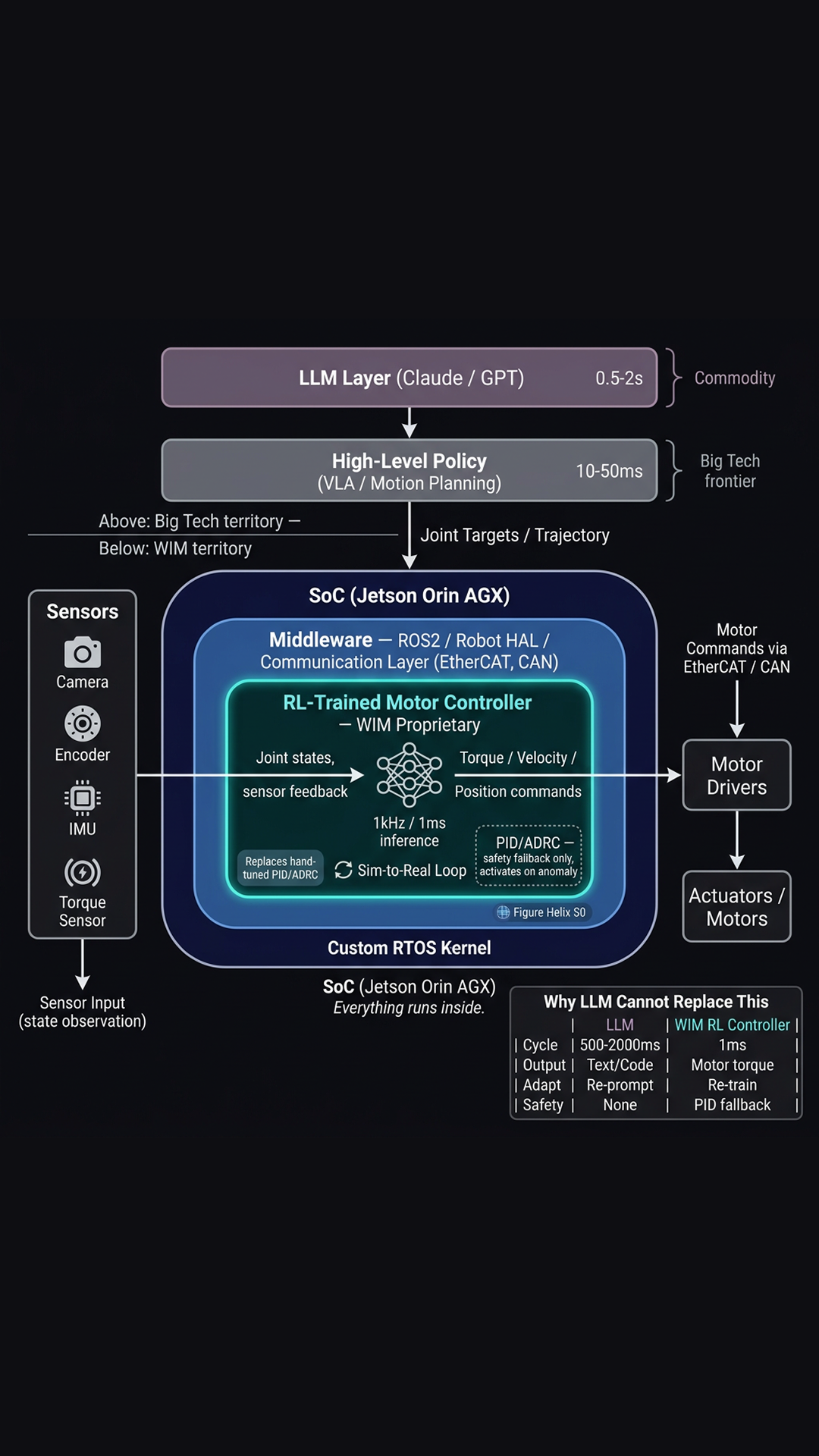
LLM 연동 실시간 로봇 제어
Real-Time Robot Control with LLM Integration
ChatGPT, Claude 같은 LLM이 사람의 명령을 이해하면 WIM의 모터 컨트롤러가 이를 실시간 관절 제어로 변환합니다. 1ms(1kHz) 주기로 토크·속도·위치 명령을 생성하며 이상 상황 발생 시 안전 제어로 자동 전환됩니다.