WIM Robot Controller HW+SW All-in-One AI Robot Controller
- IPC + PLC + GPU unified in a single box
- 275 TOPS compute · 1ms (1kHz) real-time control
- 128-axis simultaneous control · EtherCAT / EtherNet/IP
- 11 KIRIA·KOTCA certifications

Why are traditional robot controllers not enough?
Hardware Separation
GPU (AI) and PLC (control) are physically separated → communication latency, synchronization issues
Software Fragmentation
Different OS·drivers per robot type/chipset → increased development costs
Complex Systems
Separate wiring, external PC required → constraints on mobile/compact robots
Scattered Maintenance
IPC, PLC, and SW vendors managed separately → slow root-cause diagnosis when failures occur
One Box Solves Everything
Traditionally, you had to buy hardware (IPC + PLC), install software, configure drivers, and set up communication separately. With WIM Robot Controller, everything comes in a single box.
NVIDIA Jetson Orin AGX Controller
275 TOPS compute with 128-axis simultaneous control in a single module. Supports EtherCAT, EtherNet/IP, and Modbus TCP for instant integration.
BASED ON JETSON ORIN
275TOPS
Compute
128axes
Simultaneous
1ms
Control Cycle
<11kg
Weight
EtherCAT
Industrial RT
Ethernet
1Gbps
Wi-Fi · BT
Wireless
I/O 32-port
In 16 / Out 16
PLEM — ROS 2 Robot SW Platform
Preempt RT Kernel, EtherCAT drivers, and cuMotion motion planning come pre-installed. Start developing in C++/Python right out of the box.
What Full-Stack Integration Really Means
System on Chip (SoC) eliminates CPU-GPU communication bottlenecks, while RT processes isolate CPU cores to guarantee 1ms (1kHz) periodicity without interference. Software that knows the hardware, hardware optimized for the software.
CPU
RT processes isolate CPU cores for guaranteed 1ms periodicity
One Chip, Two Roles
AI and control run simultaneously
Unified Memory
Zero-copy GPU ↔ CPU
64GB
GPU
AI inference and vision processed in real-time on one GPU
One Chip, Two Roles
AI and control run simultaneously
Unified Memory
Zero-copy GPU ↔ CPU
CPU
RT processes isolate CPU cores for guaranteed 1ms periodicity
GPU
AI inference and vision processed in real-time on one GPU
Robot Software Platform
PLEM
Hover a layer to explore the architecture
Robot Software Platform
PLEM
Hover a layer to explore the architecture
Software Components
Robot Control Core Libraries
Core library (trajectory, position/torque control), Hardware communication library, Upper/lower integration interface, Sensor calibration, Customizable control algorithms
AI / Physical AI Libraries
Calibration, CUDA/TensorRT optimization, Conveyor tracking
Industrial Communication Drivers
EtherCAT Master, I/O Control, Multi-axis synchronization
Developer Tools & API
REST API, CLI tools, Logging, Monitoring dashboard
Built on ROS 2, PLEM adds the value
Go beyond the limits of ROS 2 — a production-ready development environment for industrial deployment.
Real-time Control
ROS 2 (Base)
Requires separate RTOS setup
+ PLEM
✓Native industrial real-time control
AI Integration
ROS 2 (Base)
Install external packages individually
+ PLEM
✓CUDA/TensorRT built-in
Deployment
ROS 2 (Base)
colcon build + dependency management
+ PLEM
✓One-click Docker container deployment
Hardware Abstraction
ROS 2 (Base)
Develop HAL from scratch
+ PLEM
✓Standardized abstraction API
Initial Setup
ROS 2 (Base)
Days for environment setup
+ PLEM
✓Start developing in 5 minutes
Industrial Communication
ROS 2 (Base)
Additional packages required
+ PLEM
✓EtherCAT Master built-in
Technical Specifications
HARDWARE
SOFTWARE
Key Functions
Pick-and-place Trajectory
- Section-based movement, speed control (acceleration)
- Pick-and-place movement curve r-value change
- Cubic spline trajectory
- Conveyor tracking
- Position control, Torque control
- Place home designation (homing)
- Coupling / Decoupling
Input/Output Control
- Conveyor encoder control
- Solenoid valve control
Calibration
- Robot Calibration
- Vision-robot calibration
Everything you need for AI robot control in a single box
| Comparison Item | Traditional (Separated) | WIM Robot Controller (Integrated) |
|---|---|---|
| Control Dev Time | EtherCAT setup, servo tuning, real-time guarantees yourself → 6 months~2 years | ✓Built-in — works out of the box, dramatically shorter time to market |
| Control Stability | OS interference destabilizes control loop → precision work at risk | ✓1kHz deterministic real-time control — proven in manufacturing, aerospace, precision tasks |
| System Complexity | IPC + PLC + GPU separated → many debug points, hard to isolate failures | ✓Single box integration — fewer failure points, simpler maintenance |
| Dev Risk | Different env per manufacturer → relearn on every robot change | ✓Standard environment — code reuse, portable across robots |
| Technical Assets | Black-box controller → customer know-how locked to vendor | ✓Code & tuning 100% customer-owned — technology internalization |
Control Dev Time
EtherCAT setup, servo tuning, real-time guarantees yourself → 6 months~2 years
✓Built-in — works out of the box, dramatically shorter time to market
Control Stability
OS interference destabilizes control loop → precision work at risk
✓1kHz deterministic real-time control — proven in manufacturing, aerospace, precision tasks
System Complexity
IPC + PLC + GPU separated → many debug points, hard to isolate failures
✓Single box integration — fewer failure points, simpler maintenance
Dev Risk
Different env per manufacturer → relearn on every robot change
✓Standard environment — code reuse, portable across robots
Technical Assets
Black-box controller → customer know-how locked to vendor
✓Code & tuning 100% customer-owned — technology internalization
Find the Right WIM Robot Controller Configuration
Check what applies to you. Our engineering team will propose the optimal setup.
Setup Method
Dev Environment
Robot Selection
Use Case
Add-ons
Real-World Applications
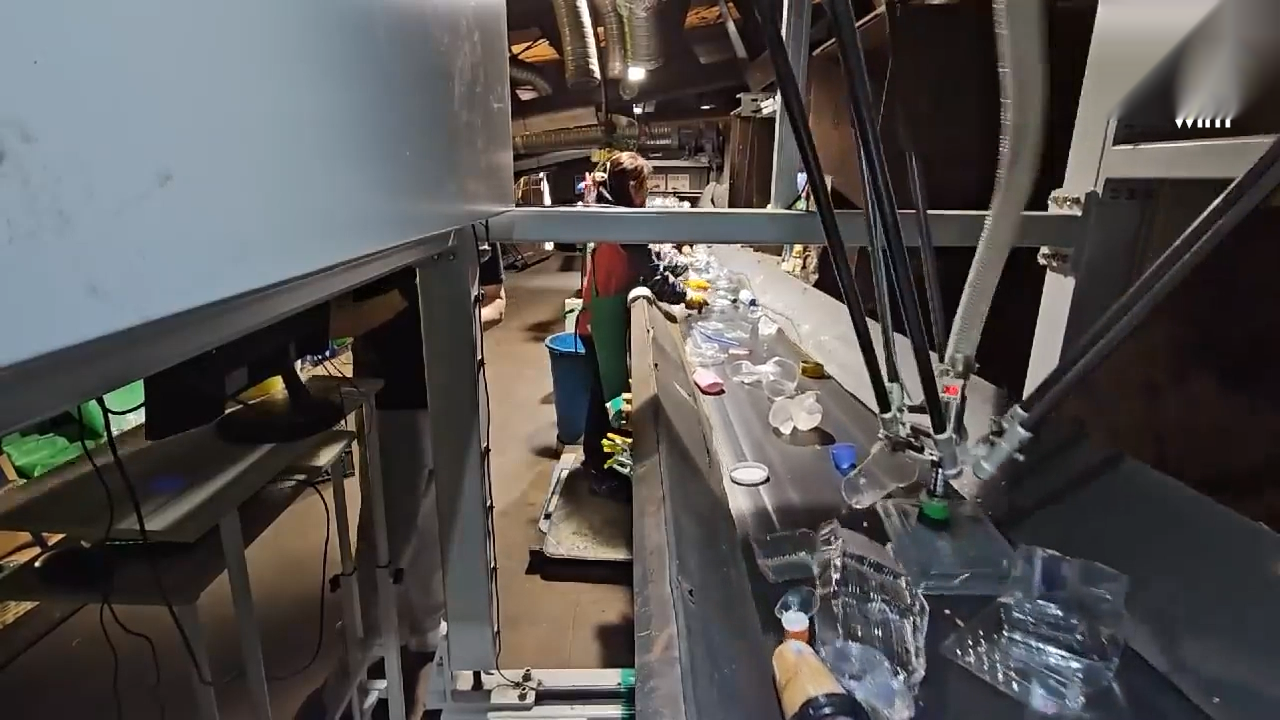
Waste Sorting
AI vision-based material and shape classification with automated sorting

Crop Harvesting
AI ripeness detection for autonomous harvesting in unstructured environments
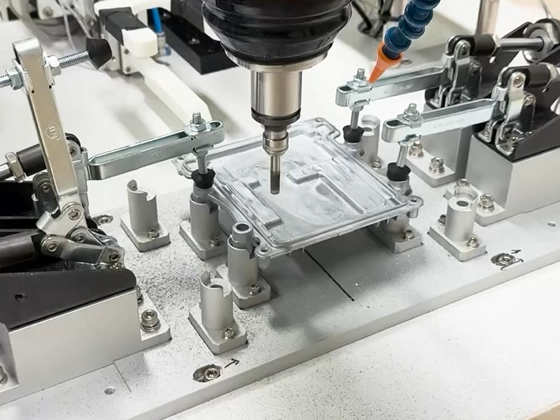
Parts Machining
Precision position control with automated real-time quality inspection
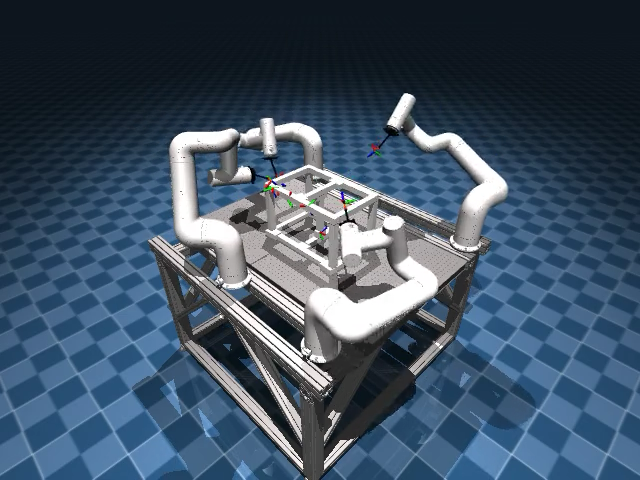
Multi-Robot Simulation
Multi-robot cooperative control simulation and optimization
Frequently Asked Questions
Is your company a hardware or software company? What are your core technologies?+
We possess full-stack SW technology for AI robot development, including SoC-based RTOS development. (Full-Stack)
We have the technology to build a dedicated real-time operating system (RTOS) that ensures precise motion on the SoC — the 'brain' of the robot controller — along with all A-to-Z software technologies needed to make robots Move, See (Vision), and Think (AI).
We sell our technology in a form that customers can easily adopt.
We provide our full-stack technology so customers can easily adopt it. Customers only need to develop their core AI solutions on top of our platform, dramatically reducing development time and cost.
Different SoC manufacturers have pros and cons. Are you limited to a specific chipset?+
We currently use NVIDIA chips, chosen for GPU parallel processing capabilities.
We adopted the NVIDIA Jetson series as the proven hardware that can most quickly build the general-purpose GPU-based parallel processing environment needed for AI robot development.
We plan to expand to various chipset manufacturers including Samsung Exynos.
AI robots serve diverse purposes depending on their objectives and form factors, requiring the flexibility to choose appropriate chipsets. We are pursuing the business direction of developing our software to run on any manufacturer's chipset, including Samsung Exynos with its strengths in high-speed communication and low power consumption.
How does WIM Robot Controller differentiate from using NVIDIA Jetson standalone?+
Jetson is excellent 'compute hardware,' but it cannot become a 'real-time robot controller' on its own.
Jetson's default OS does not guarantee real-time performance, making precise motor control impossible. Most companies end up adding external controllers, which reintroduces data bottlenecks and cost increases.
We provide a full-stack solution that performs both AI computation and real-time robot control simultaneously on the high-performance Jetson SoC.
What advantages does WIM Robot Controller offer over traditional approaches?+
Technology internalization without depending on external solutions.
With internalized technology, you can reduce maintenance vendor costs or perform maintenance in-house.
Develop optimal solutions using your own data.
Nobody understands and manages your data better than you. Developing AI solutions in-house and applying them directly to your robots is the best way to achieve peak performance.
How is this different from conventional approaches?+
Previously, robots didn't have built-in GPUs
Traditional approaches require externally attaching GPUs to controllers, which demands extensive work on GPU drivers, AI SW libraries, frameworks, and robot communication. Our controller has GPU built into the hardware, and we provide the complete development environment so customers can focus solely on core logic development.
Previously, each robot brand could only be controlled by its own proprietary controller
Our controller works with any ROS2-supported robot or any motor with EtherCAT/CAN communication, offering true universality. As more robot companies adopt ROS2, a single WIM Robot Controller can control diverse robots from different manufacturers.
Most robot companies only allowed simple script modifications, not code-level access
We open everything down to the code level, providing developers with maximum freedom.
What does 1kHz real-time control actually mean on the shop floor?+
Deterministic 1ms control cycle
Motor commands are issued every 1ms without delay or jitter, preserving path accuracy in high-speed machining, precision assembly, and vision-tracking tasks.
Stability vs. general-purpose OS
Generic Linux/Windows-based controllers suffer scheduler interference that destabilizes the control loop and puts precision work at risk; W-RC guarantees cycle time via a Preempt RT kernel architecture.
What does 275 TOPS actually mean for on-device AI inference?+
Run vision and control networks concurrently
With 275 TOPS (INT8) of compute, multiple networks — object detection, pose estimation, trajectory generation — run concurrently on-device without an external server.
Edge inference removes network latency
Inference and motor control share one box, eliminating round-trip latency to external GPU servers and enabling real-time closed-loop AI control.