Explore WIM's Technology for Intelligent Robots
From simulation to LLM integration, WIM's proprietary technologies make robots more precise and intelligent.
Simulation Integration
Simulation
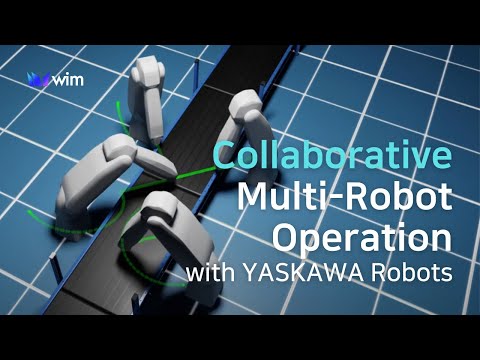
3D Digital Twin Environment with Multi-Robot Control
Before deploying industrial robots and building automation systems, we construct 3D digital twins of manufacturing processes through simulation. Simulation testing in a 3D digital twin environment allows you to preview actual robot deployment, verify motion ranges, prevent multi-robot collisions, and collect predictive data.


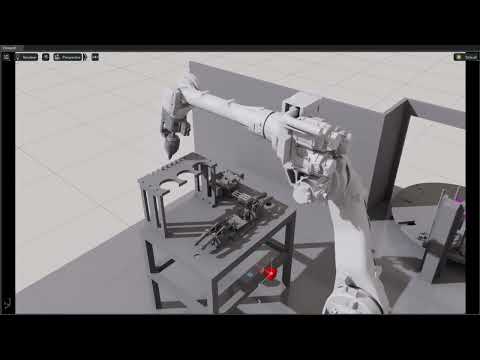
Simulation-Based Robot Control
Precisely control robots up to trajectory level in ROS2-based simulation environments, with identical control in real-world settings. Office-based simulation work greatly improves engineer accessibility.

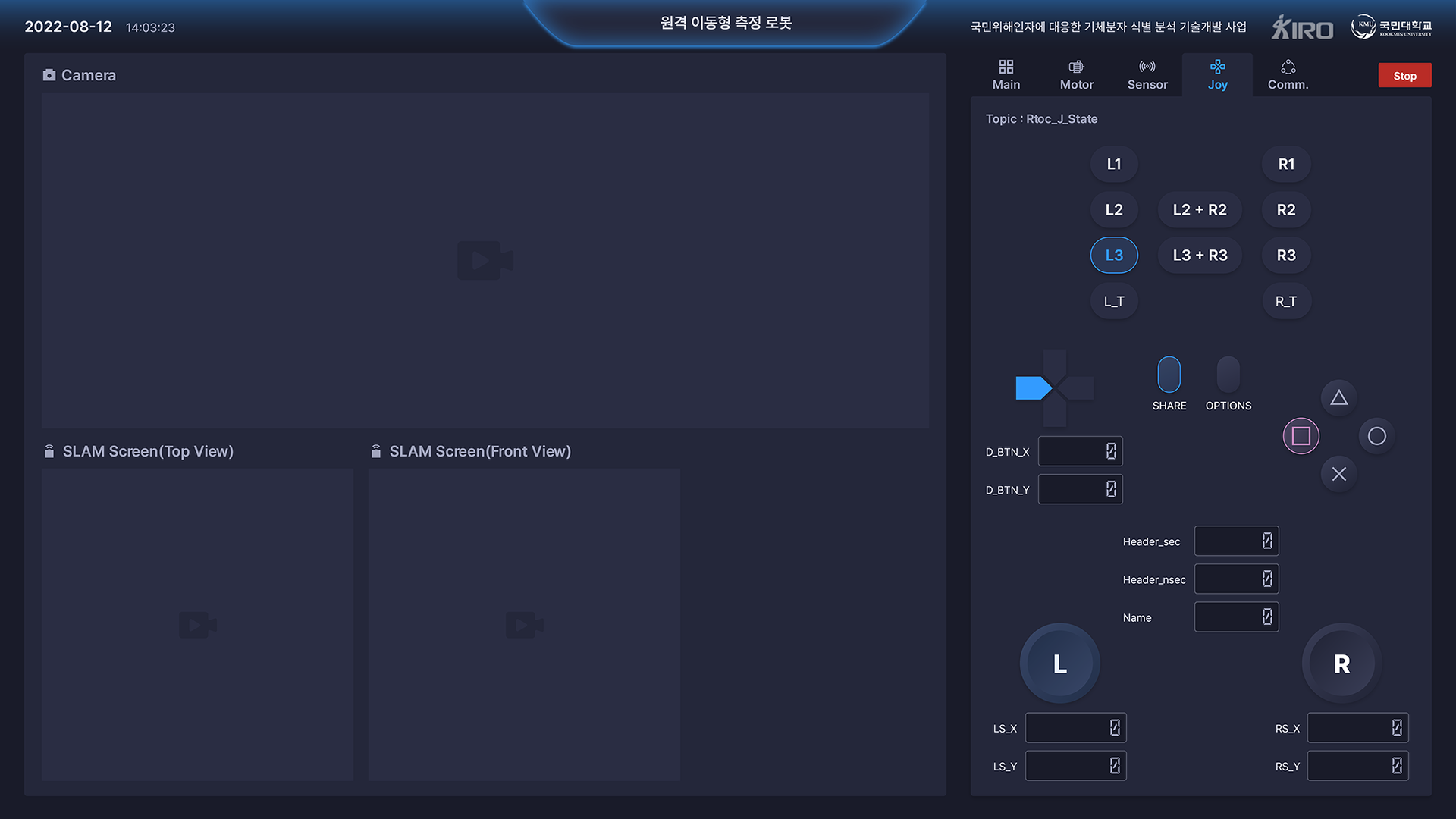
ArUco Marker Robot Control
AruCo Marker
ArUco Markers are visual markers based on 2D square codes with unique binary patterns, enabling robots to accurately determine their position and posture, maintaining reference points and performing stable operations even amid environmental changes.


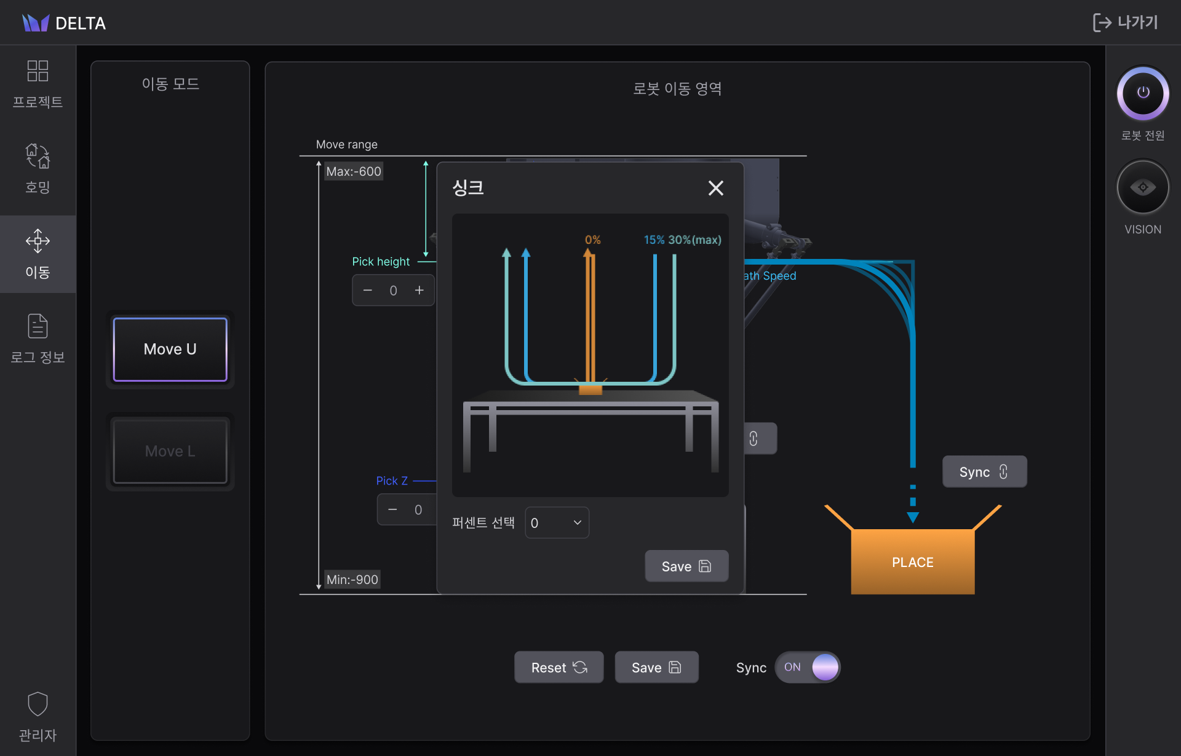
Tablet-based Robot Control
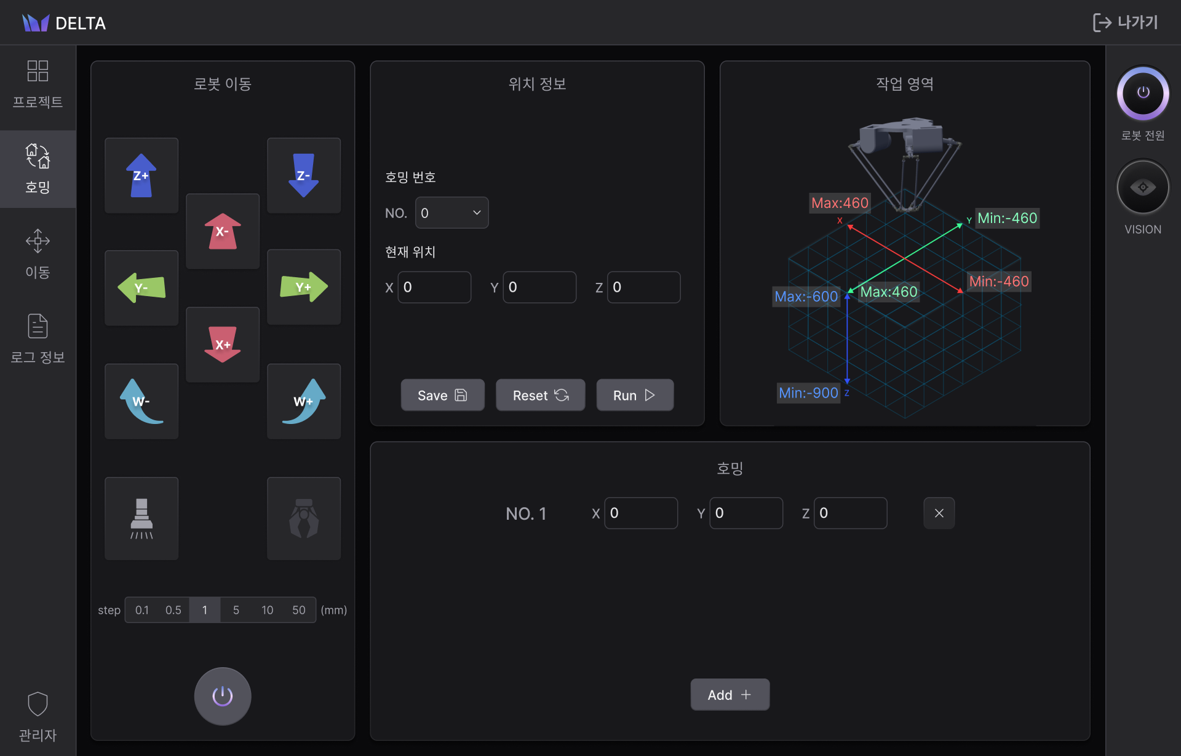
W-GUI (WIM Graphical User Interface)
W-GUI is a graphical user interface that allows intuitive robot arm control from a tablet screen without any robot programming. Even field operators without robot development experience can easily operate industrial robots. Compatible with mobile tablets for excellent scalability, maximizing efficiency and flexibility across various industrial sites.
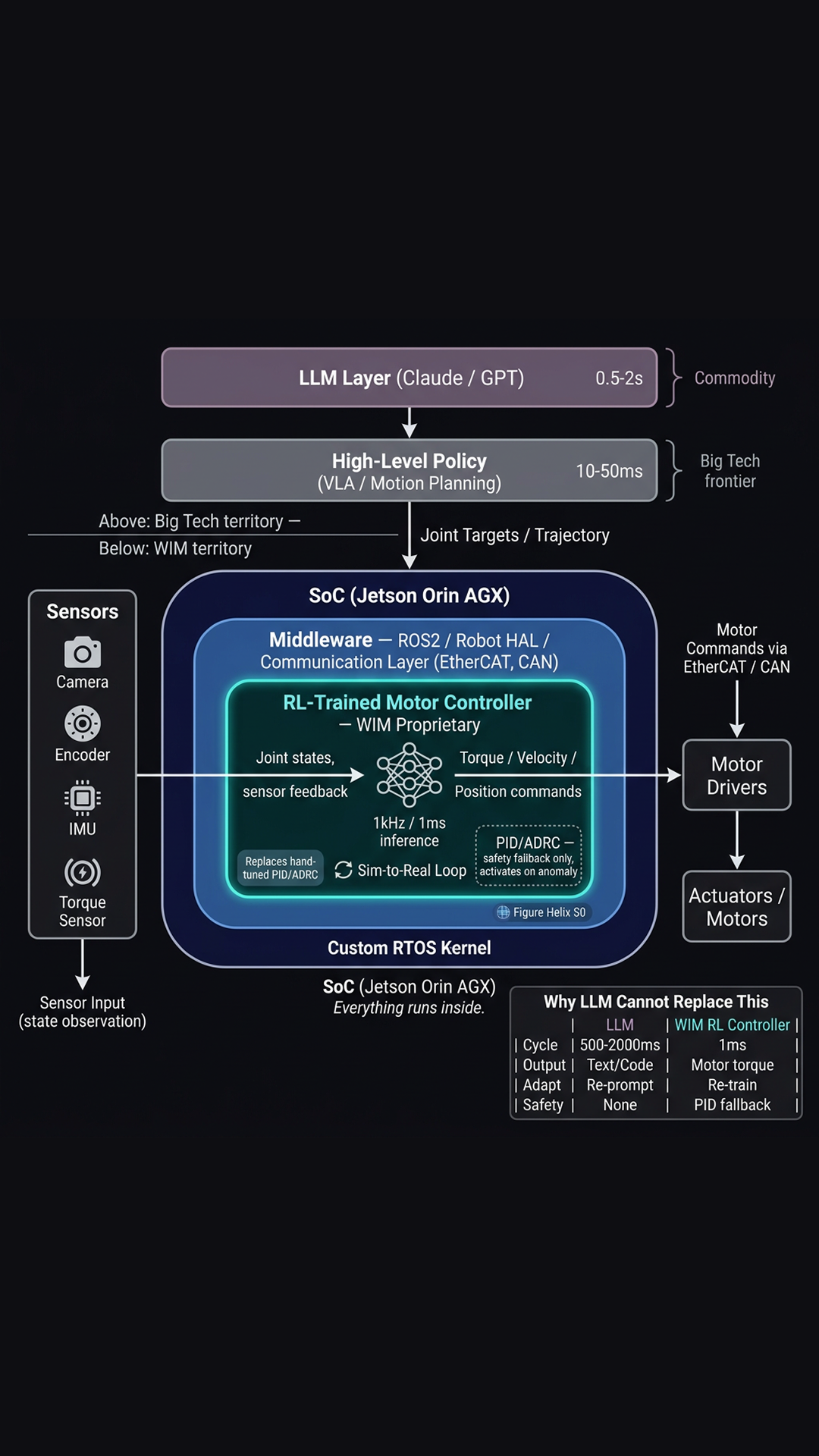
Real-Time Robot Control with LLM
Real-Time Robot Control with LLM Integration
When LLMs like ChatGPT and Claude understand human commands, WIM's reinforcement learning motor controller converts them into real-time joint control. Generating torque, velocity, and position commands at 1ms (1kHz) intervals, with automatic switching to safety control when anomalies occur.